AI in Self-Driving Cars: The Tech That’s Actually Driving Autonomous Vehicles
So here’s the thing about self-driving cars. Every year since like 2015, we’ve been told they’re “just around the corner.” And every year, we’re still waiting.
But you know what? The AI behind these things is actually pretty damn impressive, even if full autonomy is taking longer than Silicon Valley promised. I’ve spent way too many hours digging into how this stuff actually works, and I want to share what’s really happening under the hood.
This isn’t a puff piece about how autonomous vehicles will solve all our problems. It’s a look at the real AI tech making this possible and why it’s harder than it looks.
This article is part of our comprehensive guide on Artificial Intelligence and Machine Learning. For more foundational concepts, check out our Introduction to Artificial Intelligence.
The Core AI Systems: It’s Not Just One Thing
Here’s what nobody tells you upfront: there’s no single “self-driving AI.” It’s more like a dozen different AI systems all running at once, each handling specific tasks. When one fails, the whole thing gets sketchy real fast.
The main players are:
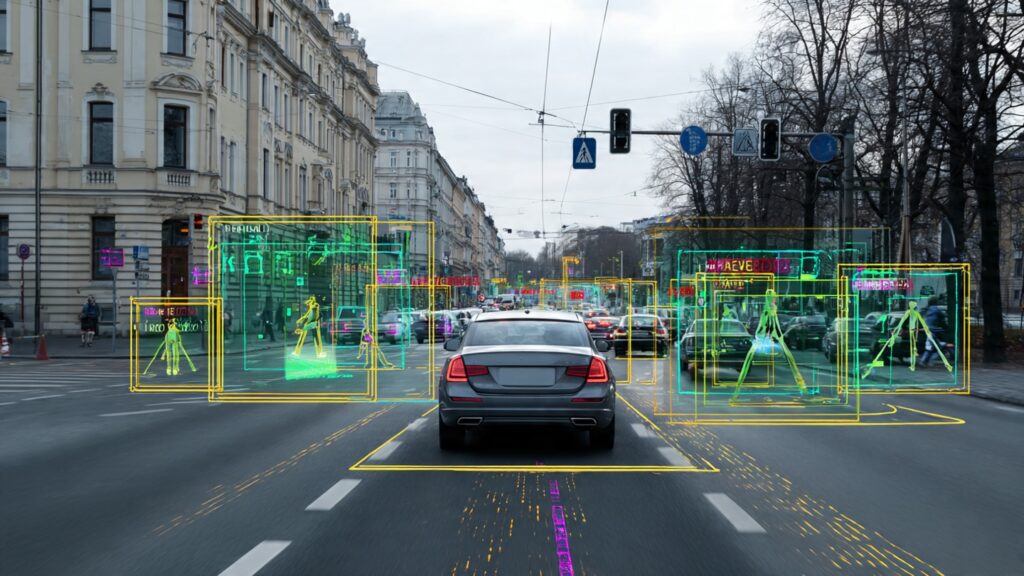
Perception systems handle what the car “sees.” This is where computer vision comes in heavy. Cameras, LIDAR, radar, all feeding data into neural networks that identify objects. Is that a pedestrian? A plastic bag? A cyclist? The AI needs to know, and it needs to know NOW.
Prediction systems figure out what everything around you is about to do. Will that car change lanes? Is the pedestrian going to step into the road? This involves analyzing movement patterns and making educated guesses based on millions of training scenarios.
Planning systems decide what the car should do next. Speed up? Slow down? Change lanes? This is where things get complicated because the AI has to balance safety, efficiency, and not driving like your grandma.
Control systems actually execute those decisions. They translate high-level plans (“change lanes”) into specific steering, acceleration, and braking commands.
All of this happens in milliseconds. And it has to happen continuously.
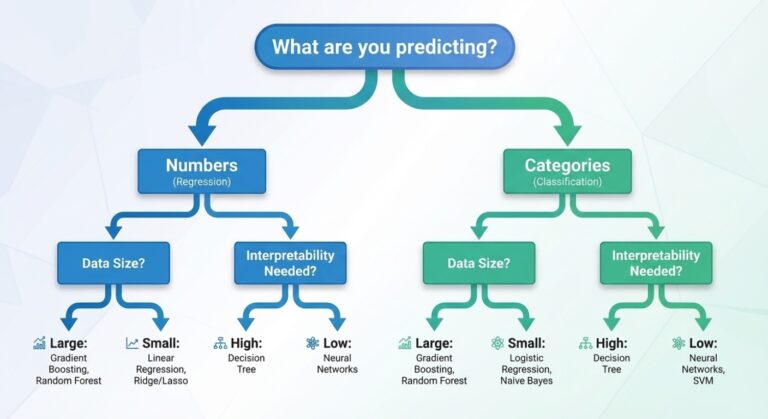
The Machine Learning Stack: What’s Really Under the Hood
Let’s talk about the machine learning basics that power these systems.
Most autonomous vehicle companies use a combination of supervised learning, reinforcement learning, and good old-fashioned rules-based systems. Yeah, I said it. Not everything is fancy AI.
The supervised learning part involves training models on literally millions of hours of driving data. Waymo alone has driven over 20 million miles on public roads. That’s a lot of training data. The models learn to recognize patterns like “when you see a red octagon, that’s probably a stop sign” and “pedestrians at crosswalks usually have right of way.”
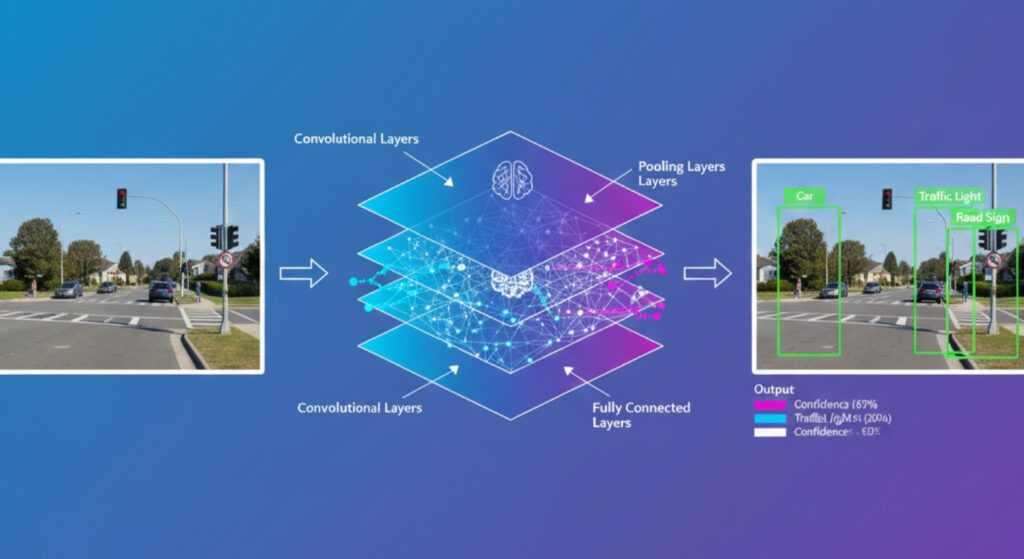
But here’s where it gets interesting. Deep learning networks, specifically convolutional neural networks (CNNs), handle the perception tasks. These are the same types of networks used in image recognition, but they’re trained specifically on road scenarios.
For decision-making, many companies use reinforcement learning. The AI learns by trial and error in simulation. Make a good lane change? Reward. Cut someone off? Penalty. Do this billions of times in simulation, and you get an AI that hopefully makes decent decisions in the real world.
The problem? Simulation isn’t reality. And that gap is bigger than anyone wants to admit.
The Sensor Fusion Challenge: When Your Eyes Disagree
One thing that makes this whole setup complicated is sensor fusion. You’ve got cameras, LIDAR, radar, and sometimes ultrasonic sensors all giving you different information about the same thing.
Camera says there’s a car 50 feet ahead. LIDAR says 52 feet. Radar says 48 feet. What’s the truth? The AI has to figure that out and make a decision.
I talked to a friend who works on perception systems, and he told me about a case where their system completely missed a stationary firetruck because the LIDAR saw it but the camera didn’t (sun glare), and the AI was weighted too heavily toward camera data. The car didn’t brake. That’s… not good.
This is why you need AI algorithms that can handle uncertainty and conflicting data. Most systems use some form of Kalman filtering or Bayesian inference to merge sensor data intelligently. But it’s never perfect.
Real-Time Processing: The Latency Problem Nobody Talks About
Here’s something that keeps autonomous vehicle engineers up at night: latency.
At highway speeds, your car is traveling about 30 meters per second. If your AI takes 300 milliseconds to make a decision, you’ve already traveled 9 meters. That’s like two car lengths. In an emergency, that delay could be fatal.
So everything has to run on edge devices, in the car, with minimal latency. You can’t send data to the cloud for processing. By the time you get a response, you’ve hit whatever you were trying to avoid.
This means the AI models need to be optimized to run on specialized hardware like NVIDIA’s Drive platform or Tesla’s custom chips. We’re talking about running inference on neural networks with millions of parameters in real-time. It’s computationally intense.
The solution? Model quantization, pruning, and hardware acceleration. Basically, making the models smaller and faster without sacrificing too much accuracy. It’s a constant balancing act.
The Edge Cases That Break Everything

You know what’s funny? The AI handles normal driving pretty well. Highway cruising? Easy. Stop-and-go traffic? No problem. But throw in something weird, and things fall apart.
Construction zones with temporary signs? Confusing. A cop directing traffic with hand signals? The AI might just sit there. A kid chasing a ball into the street? The system better be good at predicting human behavior.
This is the “long tail” problem in autonomous driving. The 90% of common scenarios are solved. It’s the 10% of weird edge cases that’ll get you. And there are SO MANY edge cases.
Weather is another killer. Heavy rain messes with cameras. Snow covers lane markings. Fog reduces LIDAR range. The AI needs to handle all of it, or it needs to know when to give up and ask the human to take over.
The Ethics Problem: Programming Morality
Here’s where we get into ethical issues in AI territory. If an accident is unavoidable, what should the car do?
Swerve and risk the passenger? Stay straight and hit a pedestrian? There’s no good answer, and you can’t really program a car to make these decisions without someone getting upset.
The classic “trolley problem” but with actual lives at stake. Fun times.
Most companies avoid talking about this publicly. The general approach seems to be “minimize harm overall” but the specifics are murky. And honestly, I don’t envy the engineers who have to implement these systems.
Where We Actually Are vs. Where We Thought We’d Be
Let’s be real. In 2016, Elon Musk said full self-driving was two years away. In 2018, he said it was two years away. In 2020… you get the idea.
As of late 2024, we’ve got:
- Level 2 systems (Tesla Autopilot, GM Super Cruise) that handle highway driving with supervision
- Level 4 systems (Waymo, Cruise) that work in specific areas without a driver
- No Level 5 (fully autonomous everywhere) systems available to consumers
The AI works in controlled environments. Geofenced areas where the car has been trained extensively. But general purpose, drive-anywhere autonomy? We’re not there yet.
The problem isn’t the AI’s average performance. It’s the worst-case performance. A system that works 99.9% of the time still fails once every thousand trips. That’s not good enough when lives are on the line.
The Data Pipeline: Training Never Stops
One advantage companies like Tesla have is fleet learning. Every car on the road is collecting data. When something interesting happens, the data gets sent back, labeled, and used to retrain the models.
This creates a feedback loop:
- Cars encounter new scenarios
- Data gets collected and labeled
- Models get retrained
- Updates get pushed to the fleet
- Cars handle those scenarios better
It’s continuous improvement at scale. But it also means your car’s behavior can change with software updates. Sometimes better, sometimes… different.
I’ve heard stories of Tesla owners waking up to find their car drives noticeably differently after an overnight update. That’s both cool and kind of unsettling.
What’s Actually Impressive (And What’s Not)
Let me give credit where it’s due. The perception systems are genuinely impressive. The ability to identify and track hundreds of objects simultaneously in 3D space is no joke. That’s AI working.
The predictions are getting better too. Modern systems can anticipate lane changes, pedestrian movements, and traffic flow with decent accuracy.
But planning and decision-making? Still needs work. The AI can be overly cautious (annoying other drivers) or occasionally too aggressive (concerning everyone). Finding that balance is tough.
And don’t even get me started on parking lot navigation. That’s chaos even for humans, and the AI often just… gives up.
The Future: What’s Actually Coming
Looking ahead, the technology will improve. Models will get better. Hardware will get faster. Training data will expand.
But I think the bigger breakthroughs will come from:
- Better simulation for training edge cases
- Improved sensor technology that works in all weather
- V2X communication where cars talk to each other and infrastructure
- Hybrid approaches mixing AI with traditional software
We’ll probably see wider deployment of Level 4 systems in specific use cases like delivery vehicles, trucking on highways, and robotaxis in select cities. That’s where the economics work and the technical challenges are manageable.
Full Level 5 autonomy everywhere? I’ll believe it when I see it. And I’m not holding my breath.
The Bottom Line
AI in self-driving cars is both more impressive and more limited than the hype suggests. The technology is real, it works in constrained scenarios, and it’s getting better.
But autonomous driving is an AI-complete problem. It requires human-level perception, prediction, planning, and decision-making. We’re making progress, but we’re not there yet.
If you’re interested in how this fits into the bigger picture of AI development, check out our guide on the future of artificial intelligence.
And if you want to understand more about the core technologies making this possible, dive into our articles on deep learning and AI algorithms.
The self-driving future is coming. Just not as fast as we thought it would.